
 Xbox Cloud Gaming Equirements: Internet, Devices, Controllers
Xbox Cloud Gaming Equirements: Internet, Devices, Controllers  How to Delete Sent Messages on iPhone From Both Sides
How to Delete Sent Messages on iPhone From Both Sides  Portable Monitor For Laptop Guide
Portable Monitor For Laptop Guide  Optimizing Sales Prospecting with Modern Software Tools
Optimizing Sales Prospecting with Modern Software Tools  What Is One Way That Technology Can Improve The Distribution Of Goods?
What Is One Way That Technology Can Improve The Distribution Of Goods?  Xbox Cloud gaming: A Practical Guide For Real Life
Xbox Cloud gaming: A Practical Guide For Real Life  Game Pass vs PlayStation Plus: which is actually worth it?
Game Pass vs PlayStation Plus: which is actually worth it?  Macfox X1S installation guide: assembly, setup, and first ride checks
Macfox X1S installation guide: assembly, setup, and first ride checks 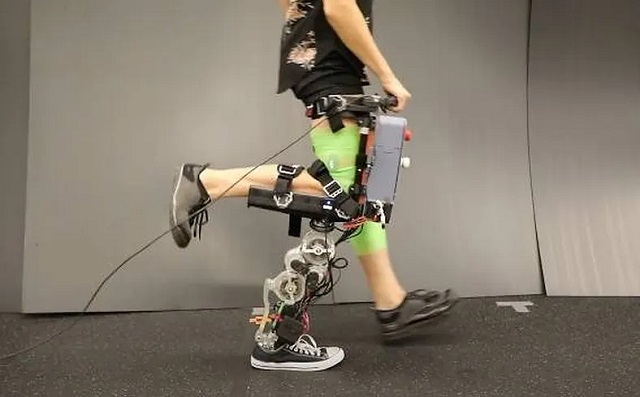
Do you want to make robotic assistive walking more natural? Then, you need to know some essential things.
A team of graduate students is creating a new process to make gaits for robotic assistive devices. They are doing it in Caltech’s AMBAR, Advanced Mechanical Bipedal Experimental Robotics Lab. Professor Aaron Ames, Bren Professor of Mechanical and Civil Engineering and Control and Dynamical Systems led the team. Their motive is to guarantee stability and provide more natural locomotion for different users.
Making Robotic Assistive Walking More Natural
In the paper published in the April 2022 issue of Robotics and Automation Letters, you can see it outlining the AMBER team’s procedure. You can see an example of combining hybrid zero dynamics (HZD). It is a mathematical framework used to create stable locomotion. In addition, it features a musculoskeletal model and helps control a robotic assistive device for walking. Using the tool, you can measure the relationship between muscle force and joint contact force. People use HZD to make stable walking gaits for bipedal robots. In the model, you can see how much a muscle extends a joint configuration.
This team demonstrates its move on a prosthetic leg. It is battery-operated and motorized. In this case, the battery helps to power the motors turning the joints. Using the mathematical algorithm, you can dictate the motor movement.
What do they do to develop the mathematical algorithm of robotic assistive walking ?
The team recorded a person’s (walking with a prosthesis) muscle activity to make this mathematical algorithm. They use electromyography (EMG) in this case. Here, they placed an electrode on the skin above a specific muscle. After that, the team analyzed the EMG activity of a person walking with a prosthesis. Later, we got to know how a human walks without a prosthesis.
What did Rachel Gehlhar say about robotic assistive walking?
Rachel Gehlhar (MS ’18), a mechanical and civil engineering graduate student, says that they want to get closer to the muscle activity pattern of a human walking without the prosthetic. When they directly embed musculoskeletal models into the optimization problem, it offers a foundation. As a result, they can produce gaits, making it feel more natural.
What did Amy Li say?
She is a graduate student in computation and neural systems. According to her, while designing a trajectory for a robotic assistive device, ensure that a satisfactory gait is stable and feels natural. The trajectory shows how researchers are willing the prosthetic device to move over time.
What did Maegan Tucker say?
Maegan Tucker said that describing the desired motions of each of the joints helps to control a robot. Leg prosthesis is the robot hence. The knee and ankle joints follow the respective trajectories to the command sent to the motor. Usually, the device comes with two actuated joints: the knee and ankle. We ask for the desired motions and velocity of joints to a robot.
The mix of muscle models and HZD produced desired walking gaits quicker than expected. If you force the robotic model to follow the muscle pattern, it can add constraints to the gait-generation optimization issue. As a result, you may face issues as more challenging to solve. After some extra constraints of the optimization problem, a stable walking gait was created.
What did Tucker say?
According to him, they assumed that combining both helps to guide the optimization problem toward solutions that can lead to natural walking. In other words, the extra constraints help to guide the optimization issue toward stable and more natural gaits quicker.
Conclusion:
Robotic assistive walking helps to complete the gap between methods and the field of biomechanics. Methods use algorithms to create desired walking motion. On the flip side, this field of biomechanics doesn’t overlap. The results allow the AMBER lab to translate natural motion into a robotic assistive a device like a prosthesis.